







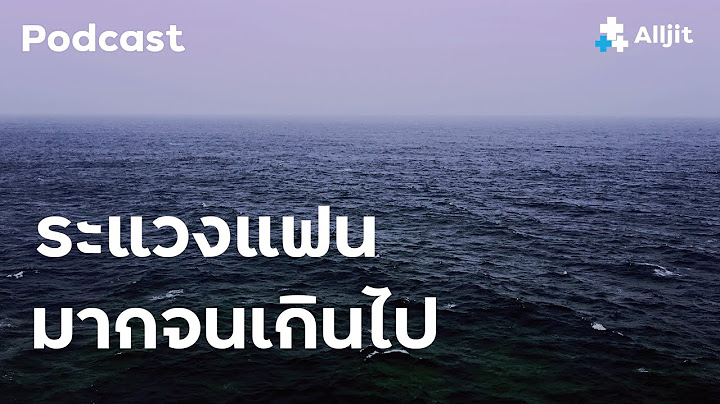
แหล่งที่มาภาพ:@dronecnx นายวันชัย แก้วดี การถ่ายภาพทางอากาศยานโดยอากาศยานไร้คนขับ (โดรน) Aerial Photography by Drone โดย ผศ.ดร. สุรพล บุญลือ และดร.ไพฑูรย์ กานต์ธัญลักษณ์ มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี วิวัฒนาการอากาศยานไร้คนขับ (Drone) วิวัฒนาการอากาศยานไร้คนขับ (Drone) แบ่งเป็น 2 ยุค ก็คือยุคก่อนสงครามโลกครั้งที่สอง และยุคหลังสงครามโลกครั้งที่สอง ความหมายคำว่า “Drone” ทำหน้าที่นำมาใช้ในภารกิจทหาร ในส่วนของภารกิจทหารสมัยก่อนนั้น ก็จะมีในเรื่องของเทคโนโลยี Radar ในการตรวจจับ จะต้องใช้เครื่องบินจริง ๆ ใช้นักบินจริง ๆ ในการที่จะบินเข้าไปตรวจจับ เพื่อที่จะหาข่าวต่าง ๆ ดังนั้น เมื่อเกิดการโจมตี หรือเกิดการจู่โจมขึ้นมา ก็จะเกิดการสูญเสีย จำนวนมหาศาล จึงมีมีแนวคิดว่า จะต้องสร้างเครื่องบินที่ไม่มีคนขับ เพื่อที่จะเข้าไป ค้นหา ตรวจจับ หรือว่าเข้าไปถ่ายภาพ ไปหาข่าวต่าง ๆ ในปัจจุบันนี้นะครับ อากาศยานไร้คนขับ นอกเหนือจากจะนำมาใช้ในภารกิจทหารแล้ว ยังมีการนำมาใช้ทางด้านพลเรือนด้วย ในยุคของเทคโนโลยีสารสนเทศ ทำให้มีการถ่ายภาพในรูปแบบใหม่ขึ้น ที่เราเรียกว่า การถ่ายภาพทางอากาศ ซึ่งสำหรับการถ่ายภาพทางอากาศ ในปัจจุบันนี้ บางคนอาจจะเรียกว่าเป็น UAV ซึ่งย่อมาจากคำว่า Unmanned Aerial Vehicle องค์ประกอบของอากาศยานไร้คนขับ  ภาพที่ 1 องค์ประกอบของโดรน ที่มา http://droneswu.blogspot.com/2017/12/1.html
ประเภทของอากาศยานไร้คนขับ ประเภทของอากาศยานไร้คนขับแบ่งเป็น 3 ประเภทด้วยกัน 1.ประเภทปีกหมุน (Multirotor) ที่เราเคยเห็นทั่วไปๆ ก็คือปีกหมุนก็จะแบ่งเป็นหลายๆขาด้วยกัน บางประเภทก็จะมีแค่ 4 ขา ปีกหมุนบางประเภทหรือบางประเภทมี 6 ขามี 8 ขาซึ่งประเภทเหล่านี้เราจะเรียกว่าประเภทที่เป็นปีกหมุนนั่นเอง จะมีปีกในการติดที่จะติดตั้ง ซึ้งสามารถถอดได้เก็บได้พับได้ 2.ประเภทปีกยึด (Fixed wing) ลักษณะของการขึ้นบินและการคอนโทรนนั้นก็จะมีความแตกต่างกันเพียงเล็กน้อยไม่ว่าจะเป็นเรื่องของการขึ้นและลง สามารถที่จะบินในลักษณะของระยะไกลๆ และเกิดความเร็วสูงได้ ดังนั้นภารกิจจะใช้ในการสำรวจนะครับสำรวจในระยะทางไกลๆ 3.ประเภทไฮบริด (Hybrid) เป็นการผสมกันระหว่างปีกหมุนและก็ปีกยึด ก็คือแบบไฮบริดก็จะทำงานใน 2 ลักษณะนั้นคือลักษณะของการขึ้นอาจจะขึ้นลักษณะของปีกหมุนนะครับ และเมื่อขึ้นไปในระดับหนึ่งก็สามารถบินโดนใช้ความเร็วของลักษณะของปีกยึดได้ก็คือมีการเอนนะครับ มีการเอนลำในลักษณะแนวนอนและก็บินไปในลักษณะแนวนอนซึ่งจะบินไปในลักษณะของปีกยึดได้ ฉะนั้นลักษณะปีกหมุนนั้นลักษณะการทำงานแบบเดียวกันกับฮีรีคอปเตอร์โดยมีใบพัดเป็นแนวนอนนะครับหรือมีใบพัดมากกว่า 2 ใบพัดนะครับเช่น มี 3 ใบพัดก็ได้ 4 ใบพัด 6 ใบพัด 8 ใบพัด อุปกรณ์ที่ใช้ในการควบคุม อุปกรณ์ที่ใช้ในการควบคุมมีอยู่ด้วยกัน 2 ประเภท ก็คือ
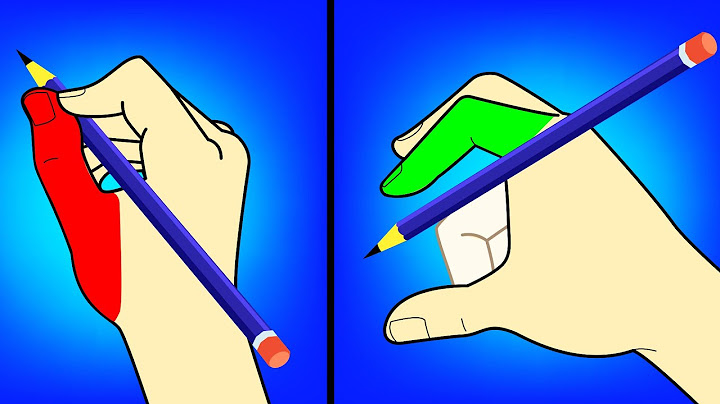
ดังนั้นอุปกรณ์ที่ใช้ในการควบคุมเหล่านี้ ภาพที่ 2 การบังคับโดรนผ่าน Remote Control หรือ Joy Stick ที่มา https://www.techxcite.com/topic/21053.html ด้านขวามือของ Remote Control จะพบว่ามีทิศทาง 4 ทิศทางด้วยกัน ก็คือ เดินหน้า ถอยหลัง ขยับไปด้านซ้าย ขยับไปด้านขวา สรุปก็คือ Remote Control ด้านขวา คือ การ Move ในแนวแกน X แกน Y แปลว่า ถ้าจะ Move เข้าหาวัตถุก็ผลักขึ้นด้านบน เดินหน้า ถ้าจะ Move ถอยห่างจากวัตถุก็ผลักลงด้านล่างหรือถอยหลัง ภาพที่ 3 การบังคับโดรนผ่านแอบพลิเคชั่นสมาร์ทโฟน ที่มา https://www.facebook.com/dronecnx/photos/a.1502887869970271/1514788375446887/?type=3&theater กฎระเบียบเกี่ยวกับการถ่ายภาพโดยใช้อากาศยานไร้คนขับ
เงื่อนไขในการบังคับหรือการปล่อยอากาศยานไร้คนขับ
เทคนิคการถ่ายภาพสำหรับงานวิดีทัศน์ เทคนิคการถ่ายภาพสำหรับงานวิดีทัศน์ โดยอากาศยานไร้คนขับ
การประเมินคุณภาพของการถ่ายภาพทางอากาศยาน สิ่งที่ถ่ายทำมานั้นตรงกับที่ได้เขียนสคริปหรือตรงกับวัตถุประสงค์ที่เราต้องการนำเสนอหรือไม่ ทีนี้วิธีการประเมินจะก็แบ่งไปตามลักษณะงานในการนำเสนอ ให้คำนึงถึงเรื่องของการประเมิน 2 ด้าน คือ 1. ด้านเนื้อหา 2. ด้านคุณภาพ กระบวนการทั้งหมดอยู่ 4 ขั้นตอน 1. การเตรียมงาน (Pre-Production) กระบวนการที่ใช้ในการบินโดรน จะมีอยู่ 3 ขั้นตอนใหญ่ๆ คือ 3A 2C และ 1P 3A คือ การวิเคราะห์ (Analysis) ประกอบด้วย – วิเคราะห์โจทย์ (Task Analysis) จะเป็นตัวกำหนดรูปแบบของการบิน กำหนดอุปกรณ์ที่เราจำเป็นจะต้องใช้ กำหนดให้เราจะต้องวิเคราะห์ว่าเราจะต้องใช้เวลาในการบินเท่าไหร่ – Location Analysis การวิเคราะห์สถานที่ สามารถทำได้สองรูปแบบ ก็คือ การวิเคราะห์จากออนไลน์ ใช้ google map ในการดูพื้นที่ ดูเส้นทางอะไรต่างๆ เราสามารถที่จะใช้ ตัวสถานที่ก็คือตัว google map เช็คก่อนได้ว่าก่อนที่เราจะไปบิน มันจะมีลักษณะอย่างไรบ้าง อันนั้นก็คือใช้ google map ได้ รวมถึงเราสามารถใช้แอพพลิเคชั่น บางตัวนะครับเอาเข้ามาช่วยในการวิเคราะห์ – Equipment Analysis การวิเคราะห์อุปกรณ์ที่เราใช้เพียงพอหรือป่าว ก็คือการวิเคราะห์อุปกรณ์เรานะครับ 2C ขั้นตอนก่อนบิน 1. Location Confirm ตรวจสอบสถานที่ก่อนที่เราจะทำการบินอีกทีหนึ่งว่าเป็นพื้นที่ห้ามบิน 2. Equipment Confirm การตรวจสอบอุปกรณ์ต่าง ๆ ว่ามีความพร้อมที่จะขึ้นบินหรือไม่ Battery ความสมบูรณ์ของใบพัด อินเทอร์เน็ตสามารถเชื่อมต่อได้ 1 P คือ Prepare คือ เตรียมอุปกรณ์เตรียมอุปกรณ์ทั้งหมดให้พร้อมก่อนที่เราจะทำการบิน เพราะฉะนั้นการบินต่าง ๆ ของการบิน 2. กระบวนการถ่ายทำ(Production) สรุปจะมีทั้งหมด 4C คือ
3.กระบวนการหลังการผลิต (Post-Production) สรุปออกมาเป็น 3C คือ
4. การนำเสนอ (Present) การ Publicizing ก็คือการเผยแพร่ออกไปบนช่องทางต่างๆ ในช่องทางต่างๆ ของสื่อที่เราจะเผยแพร่ไป ก็ตามวัตถุประสงค์ของการใช้งานเราต้องการจะผลิตมาเพื่อไปใช้ในสื่อตัวไหน ก็ควรจะปรับให้เหมาะสม เช่น ตรวจสอบช่องทางในการเผยแพร่ก่อน เช่น เราจะออกไปบน Youtube จะมีรายละเอียดของภาพเท่าไรบนโทรศัพท์มือถือ หรือ บนเครือข่าย Social media อื่นๆ เราควรจะใช้ภาพที่มีขนาดเท่าไร หรือการเผยแพร่ผลงาน โดยการ Wright ลงแผ่น DVD Blu-ray Disc หรือ CD เพื่อจะส่งงานให้ลูกค้า ทักษะการควบคุมอากาศยานไร้คนขับ ทักษะการควบคุมอากาศยานไร้คนขับมีอยู่ 3 ทักษะคือ
อย่างไรก็ตามการฝึกเป็นเพียงแค่ทฤษฎีควรจะหาโอกาสในการฝึกโดยอาจจะใช้ Drone ที่มีอยู่ใน Simulate ในเกมก็ได้ในที่ต่าง ๆ ก็ได้ลองฝึกลองใช้ในโทรศัพท์มือถือของเราลองโหลด App บางตัวที่เป็นลักษณะของการควบคุม Drone มาเพื่อลองฝึกก่อนก็ได้นะครับ เป็นการทดสอบก่อนที่เราจะไปใช้จริงทำให้ได้ตามมาตรฐานต่าง ๆ การควบคุมอากาศยานไร้คนขับในแบบฝึกต่าง ๆ เหล่านี้ถือเป็นมาตรฐานที่ทั่วโลกใช้กันครับเพราะฉะนั้นในการฝึกอบรมในการเรียนในครั้งนี้เราก็นำมาให้พวกเราได้เรียนรู้ เพื่อจะไปสู่มาตรฐานโลกต่อไปนะครับ ประโยชน์ที่ได้รับ
|

การใช้อากาศยานไร้คนขับในลักษณะการควบคุม ระดับ 3
กระทู้ที่เกี่ยวข้อง



















ลิขสิทธิ์ © 2024 th.apacode Inc.